{kind=link}
The Future of Robotics: How AI-Powered Air Hockey Agents Mastered the Table
In the evolving landscape of robotics, the line between machine precision and human intuition is blurring. Recent breakthroughs from researchers at the University of British Columbia (UBC) have pushed the boundaries of reinforcement learning, resulting in an AI-powered air hockey robot capable of competing at a level that challenges human players. This development marks a significant milestone in “Sim-to-Real” technology, where agents trained in virtual environments successfully translate their skills to the physical world.
The Science Behind the Skill: Sim-to-Real Learning
The core of this achievement lies in the sophisticated training regimen. Rather than programming the robot with rigid, rule-based instructions, the research team utilized reinforcement learning. In a simulated environment, the AI played millions of matches against itself, iterating through countless offensive and defensive strategies.

By simulating the physics of the game—friction, velocity, and the unpredictable bounce of the puck—the AI learned to anticipate outcomes rather than merely reacting to them. This “Sim-to-Real” pipeline is crucial because it allows the agent to experience thousands of hours of gameplay in a fraction of the time it would take in a physical setting, effectively compressing years of practice into a digital window.
Precision in Motion
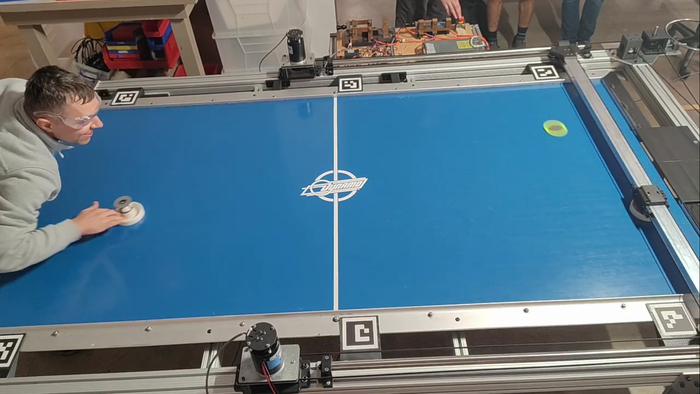
Once the AI transitioned from the virtual arena to the physical air hockey table, the challenge shifted to sensory perception. The robot utilizes high-speed cameras to monitor the puck’s position in real-time. By processing this data through its trained neural network, the system calculates the optimal interception point with millimetric accuracy.
Key technical components include:
- Real-time Tracking: High-frequency computer vision that eliminates latency, allowing the robot to track the puck at high velocities.
- Predictive Modeling: The ability to forecast the puck’s trajectory after rebounding off the table walls, a skill that traditionally requires significant human experience.
- Adaptive Control: The robot adjusts its force and positioning dynamically, balancing aggressive scoring maneuvers with strategic defensive blocks.
Why This Matters for Robotics
This project is more than just a high-tech game of air hockey. It serves as a proof-of-concept for how we can deploy robots in dynamic, unstructured environments. Most industrial robots operate in controlled settings, performing repetitive tasks. However, a game like air hockey is chaotic and fast-paced, requiring the machine to make split-second decisions based on incomplete or noisy information.
By mastering these conditions, the UBC team is paving the way for advancements in fields such as autonomous logistics, search-and-rescue robotics, and human-robot collaboration, where the ability to adapt to a changing environment is paramount.
Key Takeaways
- Efficiency through Simulation: Training AI in virtual environments drastically reduces the need for physical hardware wear and tear during the learning phase.
- Bridging the Gap: The Sim-to-Real transfer demonstrates that neural networks can handle the complexities of physical physics if the simulation is sufficiently robust.
- Open Science: The research team has made their findings and methodologies accessible, encouraging further innovation within the robotics community.
Looking Ahead
As AI continues to refine its physical dexterity, we can expect robots to transition from static assistants to dynamic partners. While an air hockey-playing robot might seem like a niche application, the underlying algorithms are the building blocks for the next generation of intelligent machines. Whether in manufacturing or service industries, the ability of AI to learn from virtual experience and execute with human-like precision is set to redefine our interaction with technology.

Frequently Asked Questions
What is Sim-to-Real technology?
Sim-to-Real is a machine learning approach where an AI agent is trained in a computer-simulated environment and then deployed to control a physical robot in the real world.
How does the robot “see” the puck?
The robot uses high-speed cameras mounted above the table to track the puck’s position and velocity, feeding this data into its central processing unit to determine its next move.
Can the AI lose?
While the AI is designed to be highly competitive, its performance is dependent on the constraints of its physical hardware—such as motor speed and mechanical latency—making it a formidable but beatable opponent for skilled human players.
Related reading